
Технология подводных осмотровых работ
Б. Я. РозманИнститут океанологии им. П.П. Ширшова РАН, Москва
В течение последних пяти лет, наряду с использованием крупных и дорогих телеуправляемых подводных роботов, требующих при эксплуатации специальные суда-носители со спускоподъемными устройствами, в мире наметилась тенденция широкого использования подводных миниаппаратов, предназначенных для поисково-осмотровых работ на глубинах до 300 м. Она сопровождается снижением цен на аппараты и на выполнение глубоководных работ в целом, а соответственно повышением доступности, как для профессионалов, так и простых любителей подводного мира. Цель проекта ГНОМ – создание семейства недорогих, малогабаритных, так называемых «персональных» ТПА с широким спектром применения.

Рис. 1. Семейство ГНОМов
Современные компьютерные и телекоммуникационные технологии на базе последних достижений микроэлектроники и высокочастотной техники позволили значительно уменьшить размеры подводных аппаратов, потребляемую мощность, обеспечить автономное питание и простоту управления. Основная функция аппаратов семейства ГНОМ – проведение подводных поисково-осмотровых работ на глубинах до 150 м. Отличительными чертами являются легкость транспортировки, простота использования, быстрое развертывание и высокая маневренность. Малые габариты – объем 1-3 дм3 – и тонкий кабель – диаметр 1-2 мм – позволяют осматривать подводные объекты не только снаружи, но и проникать внутрь. Питание от батареи и встроенный плоский жидкокристаллический монитор обеспечивают полную автономность работы. Проводить подводные осмотры можно с маломерных судов, яхт и обыкновенных лодок.
В 90-х годах прошлого столетия ряд фирм – JW.Fishers Inc (США), Hydrovision (Великобритания), Inuktun (Канада) – начали создавать так называемые мини-ROV (Remote Operated Vehicle – дистанционно управляемый аппарат). Первые малогабаритные аппараты весили порядка 30 кг, имели кабель диаметром 15-20 мм, скорость движения составляла 2-3 узла. В состав входили: видеокамера, осветители на галогенных лампах, позже добавились измерители глубины, компас. В качестве движителей использовались электромоторы постоянного тока. Аппараты потребляли 1-1.5 КВт и питались от обычной электросети, а пульт управления был оснащен телевизором или монитором. Эти мини-ROV погружались на глубины до 50-150 м. Однако многожильный кабель связи и питания создавал ряд проблем: по мере размотки больше мощности тратилось на его вытягивание, затруднялось движение аппарата, снижались маневренность и возможность стабилизации, что крайне важно при осмотрах.
Проработка возможностей использования новых технологий специалистами Института океанологии им. П.П. Ширшова показала, что можно создавать аппараты с еще меньшими размерами (микро - ROV), вплоть до размеров мыльницы, и в несколько раз меньшим энергопотреблением при сохранении таких же значений скорости. Такие аппараты смогли бы проводить обследования, проникая внутрь затонувших объектов, что невозможно было делать до сих пор. Наиболее перспективным представлялось использование тонких одножильных коак-сиальных и оптоволоконных кабелей, сверхярких светодиодов с высоким КПД и практически неограниченным ресурсом работы, бескорпусных миниатюрных видеокамер и бортовых микрокомпьютеров. На основе этих компонентов и были разработаны аппараты семейства ГНОМ (рис.1).
Система ГНОМ состоит из основного аппарата, кабеля, надводного блока и ручного пульта управления Sony. Подводный модуль выполнен в виде герметичного алюминиевого цилиндра с иллюминатором для видеокамеры. К цилиндру прикреплены четыре мини-электродвижителя с пропеллерами (два горизонтальных – по бокам аппарата, два вертикальных – вдоль корпуса) и поплавок из пенопласта для придания аппарату нейтральной плавучести. Внутри цилиндра размещены цветная видеокамера, осветители на светодиодах и блок электроники, а также электронный компас и датчик глубины, мембрана которого выходит наружу. Надводный блок включает источник питания, электронику передачи команд, данных и видео, пульт управления (джойстик). Существует вариант блока с плоским видеомонитором. Имеется также стандартный видеовыход (разъем «Тюльпан») для подключения к устройству записи и воспроизведения, например, обычному телевизору или видеомагнитофону. Электропитание автономное – 12 В (встроенный или внешний аккумулятор), либо внешнее – 220 В. Вся система с пультом управления размещена в двух переносных ударопрочных чемоданах Pelican: в одном – аппарат с катушкой кабеля, в другом – блок питания/управления и пульт, там же предусмотрено место для мини-аккумулятора 12В/12АЧ и зарядного устройства.
ГНОМ оснащен цветной видеокамерой высокого разрешения (450 твл) с сервоприводом наклона и режимом цифрового zoom. В качестве кабеля связи использован одножильный коак-сиальный кабель диаметром 2-3 мм и длиной до 250 м, по которому на ГНОМ передается электропитание (180VDC) и команды управления, а с ГНОМа транслируется видеосигнал с камеры и данные с датчиков аппарата. Кабель имеет две оболочки, между которыми протянуты кевларовые нити, выдерживает усилие до 80 кг на разрыв, не теряет гибкости при низкой температуре. Намотан на пластмассовую катушку размером 30х30х12 см, в которой установлен разъем со скользящим контактом. Такой кабель значительно меньше сдерживает движение аппарата под водой, чем многожильные кабели, используемые, к примеру, в аппаратах VideoRay или Seabotix (США), позволяет ГНОМу легко маневрировать даже на предельных глубинах и удаляться на расстояния 150-200 м. Эквивалентное продольное сечение кабеля на длине 100 м равно 0.25 кв.м, в то время как у вышеупомянутых многожильных кабелей оно составляет около 1 кв.м – разница существенная.
Технические характеристики аппаратов серии ГНОМ-4-150
- Число движителей – 4;
- Скорость: горизонтального движения – до 1 м/с; вертикального движения – до 0,5 м/с;
- Рабочая глубина – 100 м, предельно допустимая – 120 м;
- Длина кабеля – до 200 метров;
- Тип кабеля – радиочастотный РК50, специально упрочненный кевларом в полиэтиленовой оболочке, плавучесть кабеля – отрицательная;
- Диаметр кабеля – 3 мм;
- Усилие на разрыв – 50 кг, функциональные повреждения – при усилии больше 25 кг;
- Осветители: 35 светодиодов белого свечения,
плавная регулировка яркости переднего и боковых осветителей; - Видеокамера – цветная PAL CCD, 0.5 лк, 450 твл;
- Блок питания и управления: сеть 220 В; встроенный аккумулятор 7-12 АЧ, напряжение батареи индицируется на экране;
- Влажность окружающей среды – до 100%;
- Диапазон рабочих температур – -5 …+ 45 о С;
- Конструктивное исполнение – переносное, в чемоданах Pelican;
- Вес подводного аппарата – 3 кг, полной системы – 18 кг;
- Размеры подводного аппарата 320х150х120 мм;
- Оснащен датчиком глубины (точность 10-20 см) и компасом c выводом информации на видеомонитор в режиме “телетекст”. Режим автоматической стабилизации глубины “автоглубина”.
- Имеет небольшую положительную плавучесть за счет пенопластового поплавка. Регулируется с помощью балласта в полозьях аппарата.
Движители сделаны на базе отечественных электромоторов постоянного тока серии ДПР. Для передачи вращения с электромотора, помещенного в корпус, на ось гребного винта используется дисковая магнитная муфта, позволяющая существенно сократить потери мощности по сравнению с сальниковым уплотнением. Управляет работой аппарата бортовой микрокомпьютер, принимающий команды через кабель связи. Он также обрабатывает данные с датчика глубины, компаса и осуществляет коммуникацию (в модулированном цифровом коде) с блоком управления. Информация с датчиков ГНОМа выводится на экран монитора оператора в режиме “телетекст” (наложение алфавитно-цифровых данных на видеокартинку), включая многоуровневые меню режимов работы, настройки и калибровки. Реализованный в ГНОМе двунаправленный канал передачи цифровых данных, а также наличие АЦП и цифровых интерфейсов позволяет дополнять ГНОМ датчиками и такими устройствами, как альтиметр, транспондер для акустической навигации и другими.
Типы аппаратов семейства ГНОМ
На сегодняшний день выпущено несколько десятков аппаратов ГНОМ. Наибольшее распространение получил ГНОМ-4-150, рассчитанный на работу на глубинах до 120 м при длине кабеля до 200 м (рис. 2). Подводный аппарат модели 4-150 весит 3 кг, потребляет 120Вт и развивает горизонтальную скорость около двух узлов. Наличие двух вертикальных моторов обеспечивает вертикальную скорость около 1 узла, возможность наклонять аппарат и двигать его под наклоном вверх-вниз. Пульт управления может работать и по беспроводному интерфейсу (радиоканалу). Система полностью автономна и может транспортироваться одним человеком.
 |
 |
| Рис. 2. Комплект системы ГНОМ-4-150 | Рис. 3. Супер-ГНОМ 300 под водой |
ГНОМы данной модели успешно эксплуатируются уже более трех лет и весьма часто на предельных глубинах, поскольку аппарат, в отличие от упомянутых аналогов, не теряет маневровых возможностей с ростом глубины. Модель постоянно совершенствуется, развивается комплект оснащения, включая вторую камеру (устанавливается вместо заднего вертикального движителя), лазерные указатели, высокие полозья, захват, дополнительные осветители, датчик температуры. В последних моделях камера имеет сервопривод наклона, что важно при осмотрах дна водоема, а также днищ и бортов судов.
В настоящее время заканчивается разработка модели Супер ГНОМ 300 (рис. 3) с глубиной работы до 250 м, оснащенный гидролокатором Micron фирмы Tritech и мини-захватом с круговым вращением. Первоначально был создан и испытан образец на базе модели 4-150 с удвоенным числом горизонтальных моторов, в отличие от предыдущей модели. Однако в данное время идут испытания специально разработанных электродвигателей удвоенной мощности со сравнительно небольшим увеличением габаритов.

Рис. 4. Самый маленький из ГНОМов – модель ГНОМ-3-50
Для Супер ГНОМа создается подводный гараж с лебедкой, опускаемый с судна на кабель-тросе и фиксируемый на дне. Подобная схема работ наиболее эффективна для работ на глубинах больше 50-70 м – не мешает поверхностное волнение, и не “парусит” кабель, протянутый сквозь толщу воды. Кроме того, в Супер-ГНОМе есть возможность подключения ряда сенсоров для измерения параметров воды.
Также для широкого применения создана самая миниатюрная модель – ГНОМ-3-50 (рис. 4), которая представляет собой 3-х моторный аппарат весом менее 2 кг с двумя горизонтальными и одним вертикальным движителями. Цветная видеокамера аппарата помещена в полусферу из оргстекла, по одножильному коаксиалу передается питание 48 В, видеосигнал и команды управления. Рабочая глубина – до 60 м, максимальная скорость – 1.5 узла. Реализован вариант с наклоном камеры вверх-вниз, что обеспечивает угол обзора по вертикали 1800.
Работа с аппаратом
Подготовка к работе системы занимает несколько минут – подключение питания, кабелей связи, монитора, размотка кабеля. Аппарат опускают в воду и направляют на объект: либо погружая сразу, либо двигают по поверхности воды, а затем погружают, активизируя разные движители. Скорости плавно регулируются от значения 0 до максимума, при этом вектор движения, относительные значения скоростей и их изменения отражаются на экране. Для тщательного осмотра объекта имеются режимы «малого хода», поддержки постоянной скорости, а также режим стабилизации аппарата на нужной глубине. Режим фиксации вертикальной скорости удобен при длительном погружении/всплытии аппарата. Раздельно регулируются передний и два боковых осветители, что удобно при засветке от взвеси и плавающих частиц.
Уже первые аппараты были использованы для изучения поведения млекопитающих в московском дельфинарии учеными Института океанологии. Дельфины встретили ГНОМа миролюбиво, а вскоре потеряли к нему интерес, крайне аккуратно относясь к кабелю, не задевая его.
В 2000 году аппараты ГНОМ были испытаны в экспедиции МЧС по осмотру затонувшей баржи в Балтийском море. В 2002 году поучаствовали в экспедиции МЧС на Байкале с целью поиска и осмотра затонувших судов, провалившихся под лед автомобилей на зимней переправе к острову Ольхон, и показали высокую эффективность при проведении работ, как с борта судна, так и с моторной лодки. Искали затонувшие объекты с помощью гидролокатора бокового обзора, координаты фиксировались с помощью судового GPS, затем судно выходило на установленные координаты, для допоиска и осмотра опускались ГНОМы.
а) 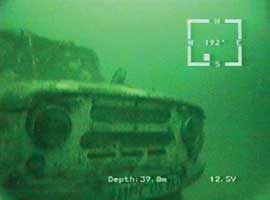 |
б)  |
| Рис. 5. Осмотр затонувшего автомобиля на глубине 38 м: а – снаружи, б – изнутри. На фото видна информация о курсе и глубине |
|
Тогда же впервые оператор смог провести ГНОМ внутрь кабины затонувшего на глубине 38 м автомобиля через приоткрытое боковое стекло и осмотреть ее (рис. 5 а-б), управляя аппаратом с судна, стоящего на якоре на расстоянии 50-60 м от объекта. Ориентация осуществлялась по компасу. Кабель, имеющий отрицательную плавучесть, ГНОМ вытягивал по дну. При приближении к объекту оператор проводил аппарат на 7-10 м дальше от него для того, чтобы при осмотре тянуть за собой только этот кусок кабеля. В этом случае остальная часть не сдерживает движения аппарата. Яркость осветителей оказалась вполне достаточной для подробного осмотра.
 |
| Рис. 6. Осмотр винтов корабля |
В отличие от простого наклона камеры, используемого в ряде аппаратов, например, в VideoRay, где свет направлен только вперед и не следует за камерой, у ГНОМа наклон аппарата направляет туда же и свет.
В этой экспедиции ГНОМы в большинстве случаев заменили водолазов, которым осталась только работа по подъему объекта в случае установления потенциальной опасности. Объект сначала находился и осматривался ГНОМом, затем по его кабелю водолаз быстро спускался точно на цель, не тратя драгоценное время на поиски. В течение 2003-2004 годов ГНОМы обследовали несколько десятков затонувших автомобилей и судов. На Байкале с их помощью теперь уже регулярно проводятся экологические работы по очистке дна от провалившихся зимой под лед автомобилей и затонувших судов.
Аппараты все шире входят в практику океанологических и экологических исследований. В Институте океанологии они используются гидробиологами для изучения донной флоры и фауны (рис. 7), проводятся подводные наблюдения за белухами, морские геологи их применяют для изучения дна, дополняя данные гидролокационной съемки. В Росэнергоатоме их используют для инспекций охлаждающих резервуаров АЭС. Аппараты имеют успех и у зарубежных исследователей и дайверов (рис. 8).
 |
 |
| Рис. 7. Осмотр дна в Белом море | Рис. 8. «Голубая дыра» в районе Мальдив |
Дальнейшее усовершенствование аппаратов планируется в следующих направлениях:
- Аппараты для профессионального применения: уже реализованный вариант ГНОМа с двумя видеокамерами, повышение мощности движителей, увеличение освещенности, оснащение гидролокатором, создание недорогой системы акустической навигации, доработка аппарата для глубин 200 м и более. Все выполняется без ощутимого увеличения размеров.
- Создание упрощенных дешевых аппаратов для исследователей подводного мира, любителей подводных съемок, а также владельцев катеров и яхт – с еще более меньшими размерами, более тонким кабелем.
- Создание уникальных комбинированных рабочих систем на базе разработанной для ГНОМа технологии. Одна из них – двухзвенный поисково-осмотровый комплекс на базе ROV-носителя (рис. 9). Комплекс уже реализован и испытывается. В качестве ROV-носителя использован модернизированный ROV Sealion компании Fisher. На Sealion размещается ГНОМ, который может запускаться с большого аппарата для осмотра труднодоступных мест, когда становится необходим малогабаритный ROV. Cистема имеет открытую архитектуру на базе Ethernet интерфейса, в которую могут быть интегрированы разнообразные устройства, имеющие ряд стандартных цифровых и аналоговых интерфейсов. В систему установлен и интегрирован гидролокатор Miniking.
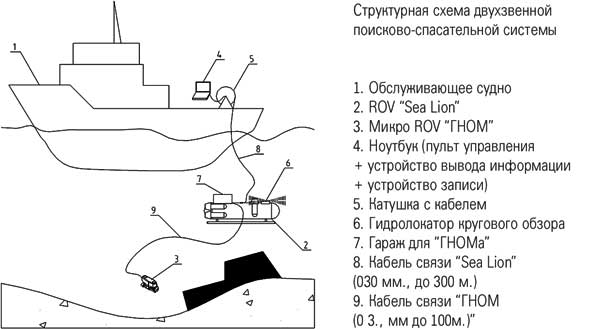 |
| Рис. 9. Схема работы двухзвенной системы |
Планируется оснащение ГНОМа системой акустической навигации – два гидрофона, опускаемые с борта судна, и транспондер. Заканчивается разработка системы дистанционной работы с ГНОМом через локальную компьютерную сеть, в том числе Интернет, – это позволит размещать аппараты на морском дне и вести долговременный мониторинг, сохраняя возможность дистанционного управления перемещением аппарата. В одном из предполагаемых вариантов он может получать питание и передавать видео/данные/управление через проложенный на дне кабель (международные проекты NEPTUN и MARS). В другом варианте на поверхности воды должен быть заякоренный буй с подзаряжаемыми батареями, а трансляция видео и управление идет через спутниковый канал. От буя ко дну идет кабель, заканчивающийся гаражом с якорем. ГНОМ доставляется в таком гараже на дно и далее, по командам оператора, проводит видеонаблюдения в радиусе действия кабеля.
Журнал «Подводные технологии и мир океана»
Октябрь 2005 г.